Final Assembly
These are the final steps of the assembly.
 | 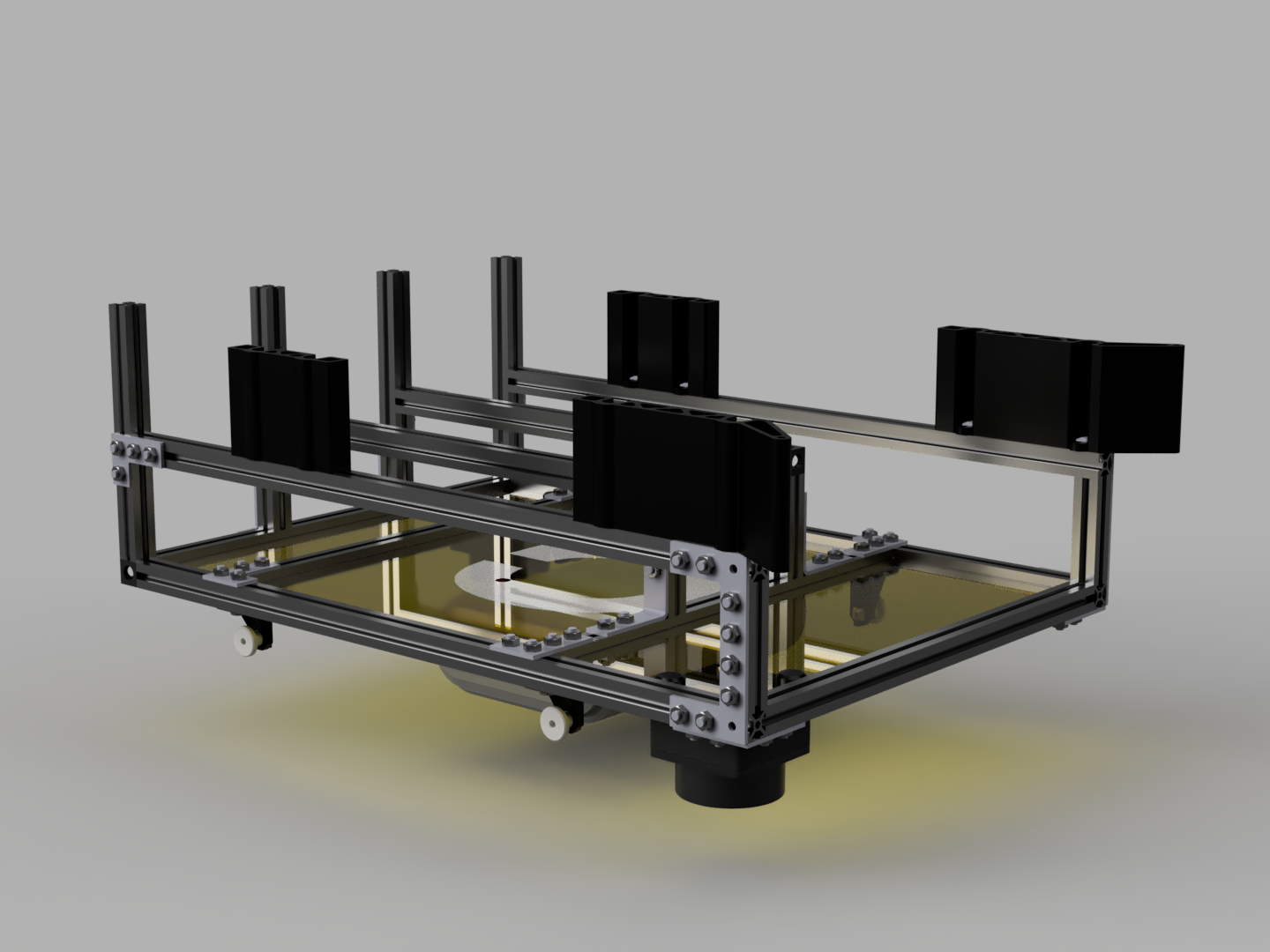 |
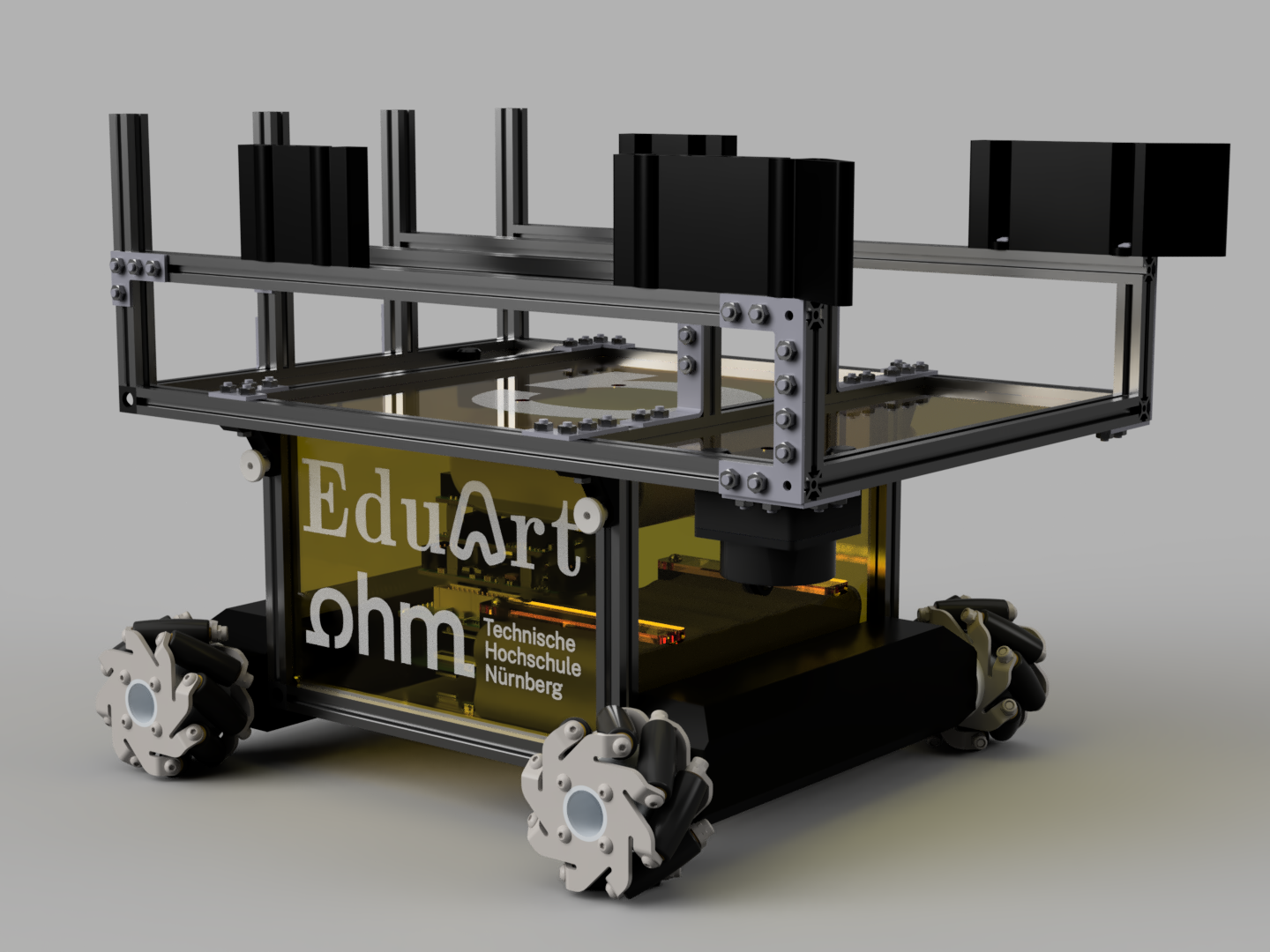
Place the Cargo Holder on top of the MiniBot Base. Then connect the Ethernet and power cable to the router. Slide the Cargo Holder on to the Base with the Corner Brackets connecting to the vertical MakerBeams. Pay attention to routing the lidar cables through the cutouts in the Side Panel Front and Back. Tighten the knurled nuts to secure the Cargo Holder to the Base.
The MiniBot is finished. Now it can be proceeded with the software.